Python AWS EMR Status via Arduino Uno LEDs
In this post, I’ll share some code I use to check if I left an AWS EMR cluster running by lighting a red (off) or green (on) LED hooked up to an Arduino Uno. This sounds silly but it helps me remember to terminate my clusters before I leave work. Besides, what else am I going to do with a spare Arduino? :)
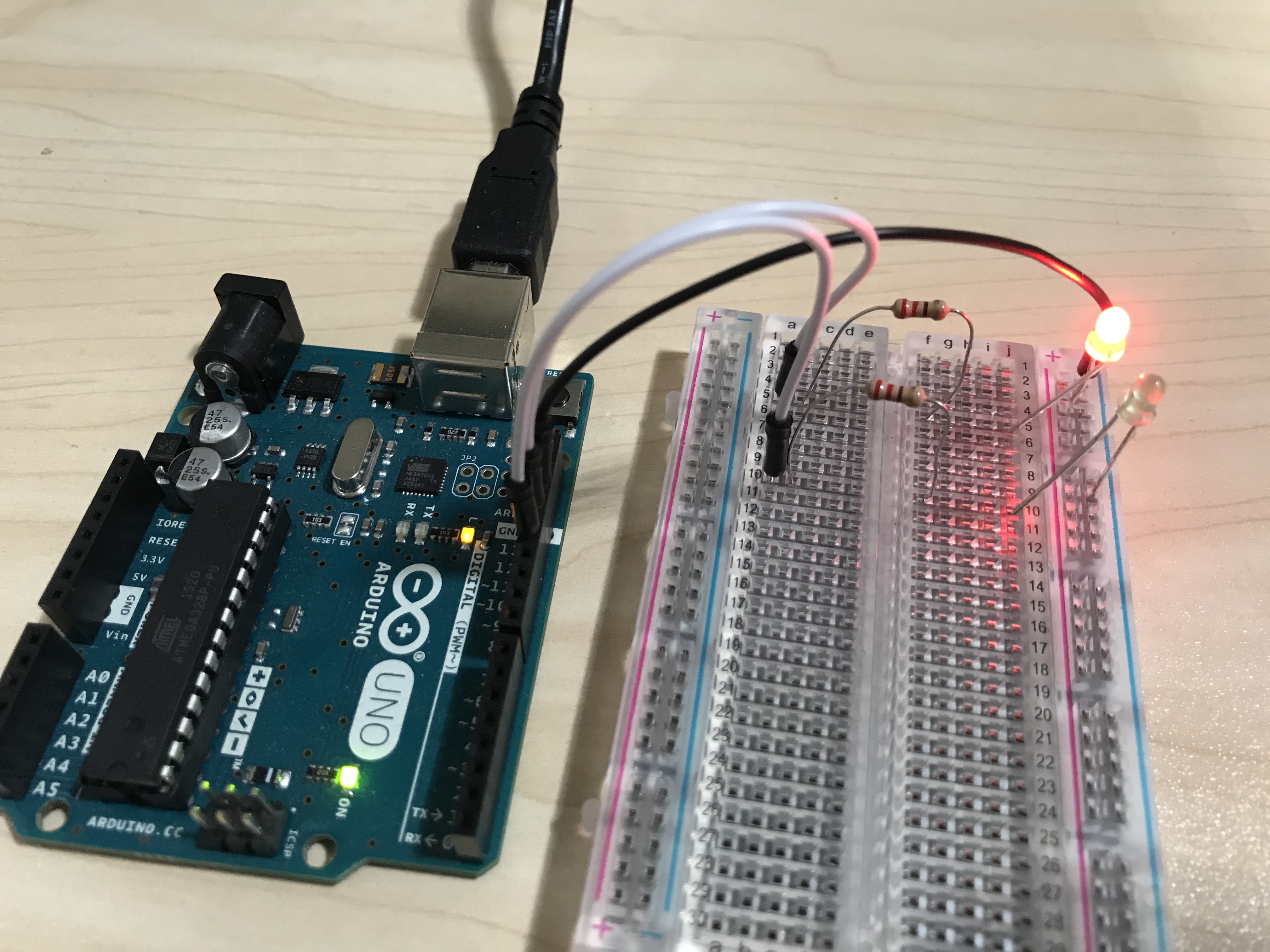
For this project I used an Arduino Uno, breadboard, 2x 220Ω resistors (red, red, brown, gold), a red LED, a green LED, and wire attached to ground, and 2 wires connected to digital pins (12 and 13).
I added the following code and flashed it to the Arduino Uno. It initializes the LED pins, reads from the serial connection, and sets the LEDs to on/off based on the bytes received from the USB connection.
// define pins for leds
int ledPinGreen = 12;
int ledPinRed = 13;
int incomingByte = 0;
void setup() {
// put your setup code here, to run once:
// set pin modes to output for leds
pinMode(ledPinGreen, OUTPUT);
pinMode(ledPinRed, OUTPUT);
// init serial connection
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
if (Serial.available() > 0) {
// read the incoming byte
incomingByte = Serial.read();
if (incomingByte == '1') {
// 1|true: set green led to on, red to off
digitalWrite(ledPinGreen, HIGH);
digitalWrite(ledPinRed, LOW);
} else {
// 0|false: set green led to off, red to on
digitalWrite(ledPinGreen, LOW);
digitalWrite(ledPinRed, HIGH);
}
}
delay(500);
}I then added a Python script that uses boto3 (AWS SDK for Python) to check if a cluster is running that matches my name or tags. It then writes 1 or 0 to the (USB) serial connection based on the response and loops with a delay.
import boto3
from time import sleep
import serial
# string to match on cluster name and cluster tags
matching_name = 'Eric'
# USB/serial connection
serial_device = '/dev/tty.usbmodem1411'
serial_speed = 9600
class EmrWatcher:
def __init__(self, matching_name, serial_device, serial_speed):
self.matching_name = matching_name.lower()
self.client = boto3.client('emr')
self.serial_client = serial.Serial(serial_device, serial_speed)
# main loop. send 0|1 bytes to arduino based on boolean response from check clusters method
def watch(self):
while True:
result = self.__check_clusters()
print result
if result == True:
byteString = '1'
else:
byteString = '0'
self.serial_client.write(byteString)
sleep(60)
# check cluster name and cluster tags for match. return boolean
def __check_clusters(self):
clusters = self.__emr_clusters()
for cluster in clusters['Clusters']:
cluster_name_matches = self.__cluster_name_matches(cluster)
if cluster_name_matches:
return True
cluster_tags_match = self.__cluster_tags_match(cluster)
if cluster_tags_match:
return True
return False
# check cluster name for match. return boolean
def __cluster_name_matches(self, cluster):
if self.matching_name in cluster['Name'].lower():
return True
else:
return False
# check cluster tags for match. return boolean
def __cluster_tags_match(self, cluster):
cluster_description = self.__emr_cluster_description(cluster)
cluster_tags = self.__emr_cluster_tags(cluster_description)
tags_string = self.__cluster_tags_string(cluster_tags)
if self.matching_name in tags_string.lower():
return True
else:
return False
# create single tags string for comparison
def __cluster_tags_string(self, cluster_tags):
tag_values = [d['Value'] for d in cluster_tags]
return "".join(tag_values)
# fetch cluster description, for tags
def __emr_cluster_description(self, cluster):
return self.client.describe_cluster(
ClusterId=cluster['Id']
)
# fetch cluster tags from description
def __emr_cluster_tags(self, cluster_description):
return cluster_description['Cluster']['Tags'];
# fetch a list of non-terminated clusters
def __emr_clusters(self):
return self.client.list_clusters(
ClusterStates=[
'STARTING', 'BOOTSTRAPPING', 'RUNNING', 'WAITING'
]
)
emr_watcher = EmrWatcher(matching_name, serial_device, serial_speed)
emr_watcher.watch()I turned on the Arduino Uno and executed python emr_status.py from my Mac to start the process. If I have an EMR cluster running, it lights the green LED. Else, the red LED is lit. Super helpful.